このサイトはお使いのブラウザでは正常に動作しません。Google Chromeなど、別のブラウザを使用してください。
回転体の体積
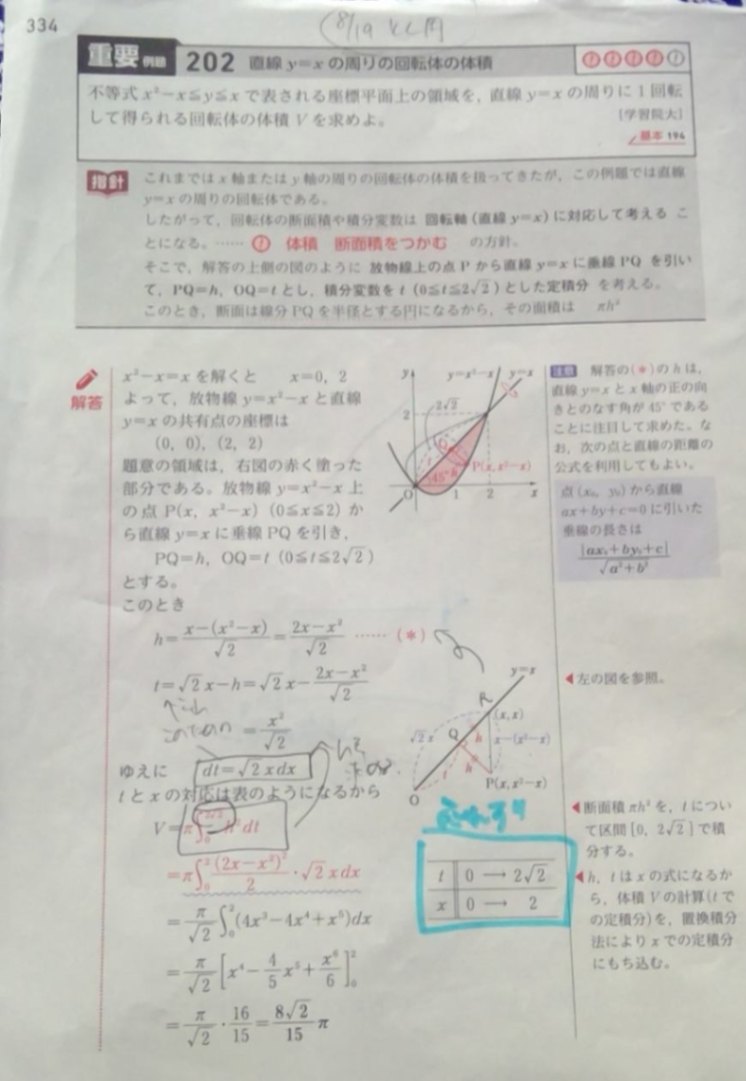
前質問させていただいたものの続きです。
tをxで表したいのはわかるのですが、やっぱりなぜ点Rを設定するのかわかりません。Rを設定すれば45°45°の直角2等辺三角形ができるのはわかるのですが...。
あとなぜ√2Xになるのかも教えていただきたいです。
回答
いや、べつにRを使わなくたっていいのですよ。hはもうxであらわせたので、あとはtをxで表わせればいいだけです。ほうほうはいろいろあると思います。模範解答だけが正しいやり方だということではないですからね。自分なりの方法を見つければいいのです。
たとえば、Pからx軸に下した垂線の足をS、Qからx軸に下した垂線の足をTとします。△QOTは45°の直角2等辺三角形だから、OT=$\dfrac{t}{\sqrt{2}}$ 。PからQTに垂線を引いて交点をUとすれば、△QUPも直角2等辺三角形なので、UP=$\dfrac{h}{\sqrt{2}}$ 。つまりTS=$\dfrac{h}{\sqrt{2}}$ 。OT+TS=xなので、$\dfrac{t}{\sqrt{2}}+\dfrac{h}{\sqrt{2}}=x$ 。これより $t=\sqrt{2}x-h$ が得られますよ。
しかし、Rに気が付けばもっと楽にtとxの関係は出せます、ということです。
√2xって、ORの長さのことですか?それは△ROSが直角2等辺三角形なのでOR=√2OS=√2xです!
これで大丈夫ですか?
y=xの傾きが1だから、x軸に垂直な線を下すと直角二等辺三角形を作れるというのがわかっていませんでした。 hとtを各自xで表すためとのこと、理解できました!
あ、そこがまだだったのですか!それはぜひ早めに気が付くようにしましょう!
教えてくださりありがとうございます。